| infotek |
2020-11-23 09:20 |
使用相干光模拟马赫泽德干涉仪
测量系统(MSY.0001 v1.1) �=,AC%S_D~
�(
*9I��p
应用示例简述 �`j}_�B�W_
�o/dM�m:TF
1. 系统说明 �R�*Xu(�89
5U�)a�b3�:
光源 FM9X}%5nu9
— 氦氖激光器(波长632.8nm;相干长度>1m) ��J�~i�O�P
元件 �Wiq{�wx�e
— 分束器和合束器,消色差准直透镜系统,位相延迟器,待测球面透镜 s,$Z�(�"B
探测器 &PRx�,G5��
— 干涉条纹 mZbWRqP[|_
建模/设计 �@3�-,�=�x
— 光线追迹:初始系统概览 43J\8WBn�@
— 几何场追迹加(GFT+): @� k�J�0K�
计算干涉条纹。 7>'uj�7r]=
分析对齐误差的影响。 �o��9�m��
Q$|^�~���
2. 系统说明 2<�[�e�D`u
(Pk"NEP��
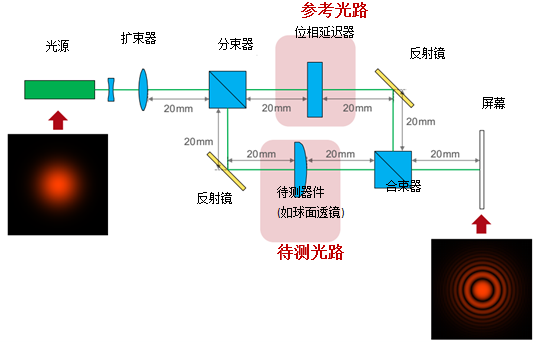
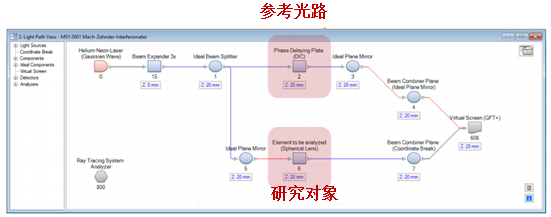
参考光路 *���?^Z)C>  $�{eY9-r_%
3. 建模/设计结果 H�B�h` 2�Q
$Wr\���[P:
 �E7X!cm/2< �E7X!cm/2<
^s^�Jz�Fw�
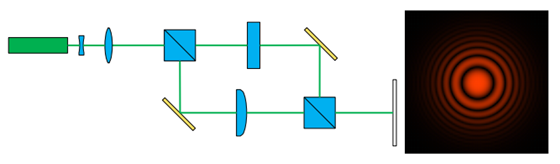
马赫泽德干涉仪的干涉图样的计算 @c�u�D8<\i
49+��� >f�
1. 仿真 h��nc�S_ZA
以光线追迹对干涉仪的仿真。 �Qy=�HrL]x
2. 计算 �O�u��Ok�=
采用几何场追迹+引擎以计算干涉图样。 �*<�*0".#�
3. 研究 �Dd!Sr8L[�
不同对齐误差在干涉图上的影响,如倾斜和偏移 ]UX`��=+�{
u�Fw�U-LCe
利用VirtualLab软件可对马赫泽德干涉仪生成的干涉图案进行研究分析。 Si�?$\H*:�
.�7�
(Dx�N
应用示例详细内容 5�l��41Q
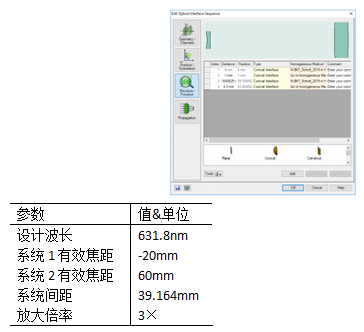
系统参数 lQV|��U;~D
1. 仿真任务:马赫泽德干涉仪 w���`c0a&7
7$!`p,@we/
通过使用这种干涉仪设置,可测量两完全相同光束线间的相对相移。 Ni�2]6��U�
�g�d337jw
这使得可以对一个样品元件引起的相移进行研究。 �a'�@-�"qk
G�1ka�F/`O
2. 说明:光源 �kCima/�+_
hq��/J6 �M
)!'n&UxPo$
使用一个频率稳定、单模氦氖激光器。 AIuMX�4n�b
因此,相干长度大于1m X^�zYQ6t��
此外,由于发散角很小,所以不需要额外的准直系统。 \*�f;�!{P{
在入射干涉仪之前,高斯波以瑞利长度传播。 aB�6Ye/Io�
rr���|"r��
 ��kWB, ;7� ��kWB, ;7�
rkxW UDl �
3. 说明:光源 �#F_'}?09%
9<xTu>��7J
%x&�F�4�U�
采用一个放大因子为3的消色差扩束器。 <=�q*N;=T,
扩束器的设计是基于伽利略望远镜。 cy�W;,uT)D
因此,在光学表面序列(OIS)中结合了一个扩束和准直系统。 M'�yO�+b�u
与开普勒望远镜相比,在扩束系统中不会成实像。 <"*�"1(�wN
4. 说明:光学元件 3c� c1EQ9�
�8@E�8!w&~
`5�~7IPl3�
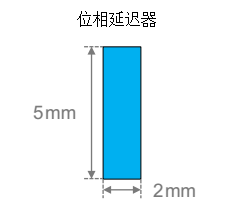
在参考光路中设置一个位相延迟平板。 4\p$�4Hs�}
位相延迟平板材料为N-BK7。 tf4*R_6;1$
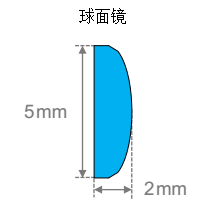
所研究的元件为球面镜,其曲率半径为100mm。 n
vm^k���
透镜材料为N-BK7。 `�vu�d�S?
其中心厚度与位相平板厚度相等。 +0VG[��c\8
p1�+7�<Y�:
$Axng
J� c
5. 马赫泽德干涉仪光路视图 �$fj])>�=H
:@.C�4o�q�
�m&�Lt6_vi
增加消色差系统和分束器距离是为了使3D视图更加清晰(可在光路编辑器中实现)。 UM<�@t�%|>
由于VirtualLab的相对位置系统,必须设置Z轴方向的距离。 +H7y/#e+3�
E]�NY
(1
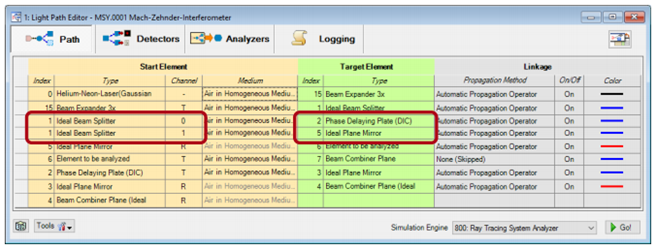
6. 分光器的设置 5N\+@gr�p�
Ba<ngG
�!
d!o.�ASL{�
aSUsy�Oe��
为实现光束分束,采用理想光束分束器。 x�J-*%'(KZ
出于该目的,在光路编辑器中建立两次光束分束器。 y �=R�
aJm
随后的组件(如相位延迟板和理想的反射镜)连接到通道0和通道1,对应于两个光束分束器 M�F�v
S��i
�S#k{e72 *
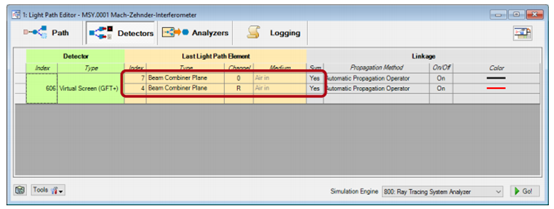
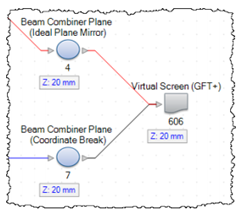
7. 合束器的设置 �g[M]i6h2
qYx!jA��]O
~L~]�QN\3�
29%�=:�*R$
两束光的直接通过虚拟屏幕探测器进行叠加(GFT +)。 ]3}f��e�U+
为此,必须选择两个输入通道的叠加,才能得到期望的干涉图。 !��Q!&CG5l
-TgU�yv�.�
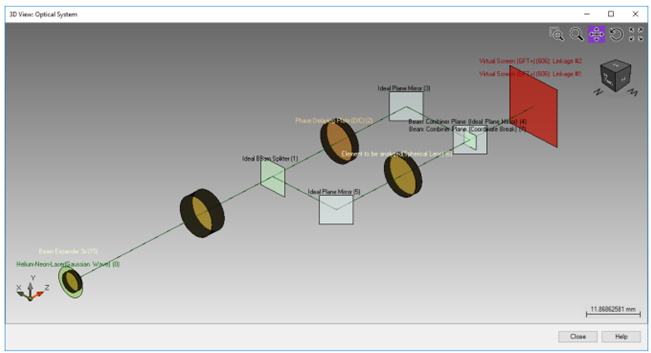
8. 马赫泽德干涉仪的3D视图 TZ�'�aNcGg
[eyb7\#�
�
' PELf
�P8
增加扩束器和分束器距离是为了使3D视图更加清晰(可在光路编辑器中实现)。 *�|oPxQCtK
应用示例详细内容 �`qE4�U��4
仿真&结果 �QO�2U�t!Y
�T8U[x�u.>
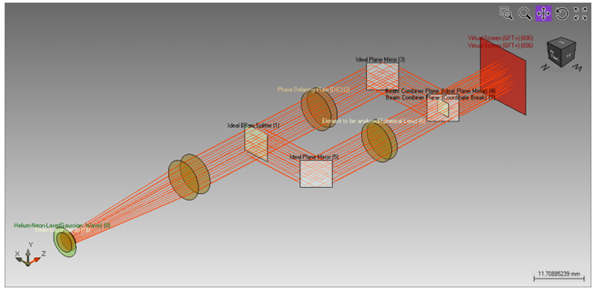
1. 结果:利用光线追迹分析 i-b1d'?�Rb
gt/!~f0��r
首先,利用光线追迹分析光在光学系统中的传播。 gV|Y�54}T�
对于该分析,采用内嵌的光线追迹系统分析器。 H��<,bq*�@
#pX8{�T�f[
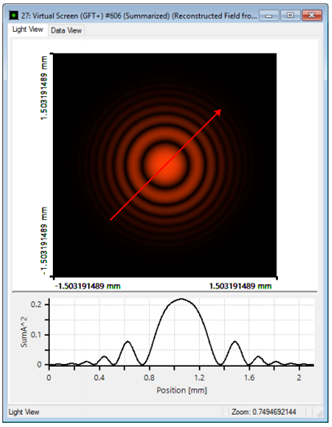
2. 结果:使用GFT+的干涉条纹 pajy�#0� U
�A�u�AT]`
gwi��R�/(1
现在,利用几何场追迹加引擎计算干涉图样。 ve�vf[�eO-
由于采用高斯光束,图形边缘光强衰减迅速。 u�sy,�V"{�
因为干涉长度大,干涉条纹显示出较明显的极大值和极小值。 >��F�yu�@u
��_%%��yV�
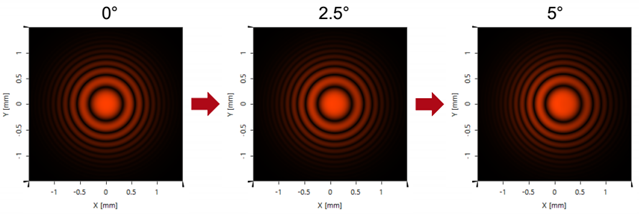
3. 对准误差的影响:元件倾斜 7�%��4.b7Q
�pw3��(��t
元件倾斜影响的研究,如球面透镜。 SiV�*W�xQe
因此,通过使用独立方向和参数运行,原件角度由0°变化至5°。 *Rq`*D>:U}
结果可以以独立的文件或动画进行输出。 G,��]z�(%�
@ u+|=x];�
4. 对准误差的影响:元件平移 +�8f>^*:u�
�d��@Z�oV
元件移动影响的研究,如球面透镜。 12lE�s��3�
现在,通过使用独立位置和参数运行,组件X位置有0mm修正为0.5mm。 3p_b8K�_bG
结果同样可以以独立的文件或动画进行输出。 NI8~Qe�Gah
 �9���:-T@u �9���:-T@u
5. 总结 7/?DP�wbx�
马赫泽德干涉仪的干涉图样的计算 >�!
oF0R_<
<(YF5Xm6$h
4. 仿真 $�@2"{�9Z
以光线追迹对干涉仪的仿真。 #/�+�I*B*y
pDOM:lG�ya
5. 计算 �=&2$/YX0D
采用几何场追迹+引擎以计算干涉图样。 I������8k�
5mavcle{4r
6. 研究 �:�_Fxy5�}
不同计算误差在干涉图上的影响,如倾斜和偏移 x%6h�M�|�U
TT7�PQf� >
利用VirtualLab软件可对马赫泽德干涉仪生成的干涉图案进行研究分。 kwlC[G$j7�
:G 5C ]'�t
扩展阅读 )[jy��[[K(
_�R74/�|��
1. 扩展阅读 �3���]��^'
以下文件给出了在VirtualLab中如何设置测量系统的更多细节。 X`�1p'JD
��TKOP;[1h
开始视频 6v�obta�^w
- 光路图介绍 Dx3�%K���S
- 参数运行介绍 M/#U2!iFk�
- 参数优化介绍 -!TcQzHUs�
其他测量系统示例: ���:B.G)M\
- 迈克尔逊干涉仪(MSY.0002) �v459},�!P
y]'CXCml)�
X�$�V|+lTk
QQ:2987619807 W�-X�pJ�\_
|
|