SYNOPSYS 光学设计软件课程六:三阶像差的重要性
/�#��:Rd�^
�JZW�gr&O<
很多镜头设计初学者和许多镜头设计师都认为,像差必须得到很好的控制。 他们只说对了一部分 - 但这些要求总是指三阶像差,但如果要求三阶像差都为零。 这是不明智的。 ~gSw�xGT7d
复制以下透镜文件并将其粘贴到EE编辑器中并运行它。 这是一个五片式透镜。 3Ne9�%���"
RLE Vf"O/o}hq,
ID FIVE-ELEMENT LENS 124 {E;2�&d���
WAVL .6562700 .5875600 .4861300 T@%;0�Ro~�
APS 5 p�g}��~vb"
UNITS MM Pd��)K^;em
OBB 0.000000 10.00000 25.40000 -8.63996 0.00000 0.00000 7(�yXsVq�
25.40000 �
%zA2%cq<
MARGIN 1.270000 ��om�XBnzT
BEVEL 0.254001 #H'�s��Z�v
0 AIR HXD*zv@ *6
1 RAD 73.9295960000000 TH 12.00000000 t-�.2�+6"\
1 N1 1.79798347 N2 1.80318130 N3 1.81530119 9(Q�U2�Q�Y
1 GTB S 'LASFN30 ' y%{*uH}S�L
1 EFILE EX1 34.000000 34.000000 34.000000 0.000000 Z���}�sG3p
1 EFILE EX2 34.000000 34.000000 0.000000 R59�e&�
�
2 RAD -263.9335099999995 TH 5.22356650 AIR �R88(dE�K�
2 EFILE EX1 34.000000 34.000000 34.000000 34X(J-1\|i
3 RAD -81.3505230000000 TH 6.00000000 f?/��|;Zo4
3 N1 1.83648474 N2 1.84664080 N3 1.87201161 7�$�g*N6)Q
3 CTE 0.830000E-05 �DQ}_9?3�
3 GTB S 'SF57 ' �FBR$,j;Y
3 EFILE EX1 31.841015 33.619003 34.000000 0.000000 �}9L 40)�8
3 EFILE EX2 33.365005 33.365005 0.000000 V-?se�k{;�
4 RAD 553.8617899999995 TH 19.92504900 AIR R=][�>\7]}
4 EFILE EX1 33.365005 33.365005 34.000000 %Nwyx;>9^K
5 CV 0.0000000000000 TH 13.18557900 AIR *%ed;>6�:Q
6 RAD 169.2089400000000 TH 9.00000000 |#DC.G��a!
6 N1 1.67418625 N2 1.67790015 N3 1.68646733 s�[0prm5�.
6 GTB S 'LAKN12 ' {B'Gm��]4�
6 EFILE EX1 25.241916 25.241916 25.495917 0.000000 �D)H?��=�G
6 EFILE EX2 25.241916 25.241916 0.000000 j\XX:uU_�
7 RAD -83.9867310000000 TH 0.10051658 AIR "o\6k"_�c>
7 EFILE EX1 25.241916 25.241916 25.495917 F�'V�+2,.
8 RAD 39.2493850000000 TH 34.99484900 o{ ,ba~$.w
8 N1 1.67418625 N2 1.67790015 N3 1.68646733 *b���$�z6.
8 GTB S 'LAKN12 ' �O0K���@�M
8 EFILE EX1 22.063038 22.063038 22.063038 0.000000 �UPfFT^=y�
8 EFILE EX2 22.063038 22.063038 0.000000 qP7&Lt��U�
9 RAD -24.3037950000000 TH 3.00000000 �"-0�pz\�a
9 N1 1.79607463 N2 1.80516268 N3 1.82772732 p�l
j�V|.?
9 CTE 0.810000E-05 C�$�N4����
9 GTB S 'SF6 ' qB+:#Yrx�/
9 EFILE EX1 12.935701 12.935701 13.697701 0.000000 k#8S`��W8^
9 EFILE EX2 11.336482 13.443700 0.000000 ~)!����V8
10 RAD 38.6888290000000 TH 7.79631890 AIR n.��Ur-ot�
10 EFILE EX1 11.336482 13.443700 13.697701 WU+�Jo@]y
11 CV 0.0000000000000 TH 0.00000000 AIR 8>%��jZ%`a
END J9b?�}-O�)
beN>5coP%A
让我们制作一个可以有效控制三阶像差的优化MACro。 7$q2v=tH�_
在EE编辑器中,输入(L6M1.MAC) C }h<�ldlY
PANT ^Ff�~j&L@{
VLIST RAD ALL VLIST TH ALL )rs|=M=X�k
VLIST GLM 1 3 6 8 9 END ^�'��C,WZt
��=��\ti�<
AANT :=iM$�_tp'
M 1 1 A FNUM eI/\I:G�{f
M 7.8 1 A BACK �0I(�GB;�E
M 0 1 A DELF �`>��`K7-H
M 0 1 A SA3 3]��:p!Y`$
M 0 1 A CO3 DW�m;&RPJ�
M 0 1 A TI3 �"lv:��h�z
M 0 1 A SI3 H}jK3;8��E
M 0 1 A PETZ ch�)Ps2i��
M 0 1 A DI3 r��2E>sHw
M 0 1 A PAC �d�Coi>�PO
M 0 1 A SAC RAD��4q"}k
M 0 1 A PLC a.�R��p#}f
M 0 1 A SLC \V"P�ma�P\
END yVmt�sQ-}a
OIX��AjU*N
SNAP ~�kSnXJ��v
SYNO 30 !7Yt`l$$�z
0bnVIG�2�q
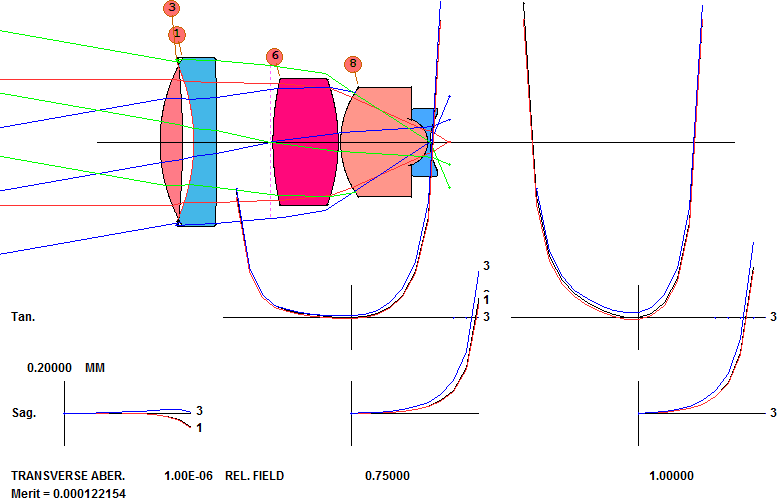
该MACro将改变所有设计变量并控制F/number ,离焦和后焦距,并同时以三阶像差校正为零作为目标。 输入VLIST RAD ALL将改变所有半径,VLIST TH ALL将改变所有厚度和空气间隔,本例中我们不建议使用VLIST GLM ALL命令,因为该命令将会改变透镜的材料,在这个例子中,我们必须单独声明表面。 LAK��-!!0X
我们运行这个MACro,得到了一个糟糕的结果! <u x*r#a!d
我们用命令查看三阶像差 V�~]'+A
q>
THIRD )�L(d$N=Bd
SYNOPSYS AI>THIRD JucxhjV#,�
=7J�|K�oKK
ID FIVE-ELEMENT LENS 179 01-JUN-17 13:49:05 V�\r�IN}7�
THIRD-ORDER ABERRATION ANALYSIS f)AW�!���/
FOCAL LENGTH ENT PUP SEMI-APER GAUSS IMAGE HT Oc"'ay(g�
50.804 25.400 8.958 Q�#J>v�wi=
(Q���h7bfd
THIRD-ORDER ABERRATION SUMS v'bd.e�q�w
SPH ABERR COMA TAN ASTIG SAG ASTIG PETZVAL DISTORTION ��H(%]� Os
(SA3) (CO3) (TI3) (SI3) (PETZ) (DI3(FR)) }VG�I Y>�v
-9.657E-06 -0.00027 -3.991E-05 -6.235E-06 1.060E-05 -0.00056 �'^-4{Y^2E
PARAXIAL CHROMATIC ABERRATION SUMS +E�iUAs�~H
AX COLOR LAT COLOR SECDRY AX SECDRY LAT �?ck�^? p7
(PAC) (PLC) (SAC) (SLC) �q�y42Y/8'
-0.00276 -0.00027 0.01062 0.00112 <R`,zE@t'(
SYNOPSYS AI> ;@7���#w�
\MFWK�#W��
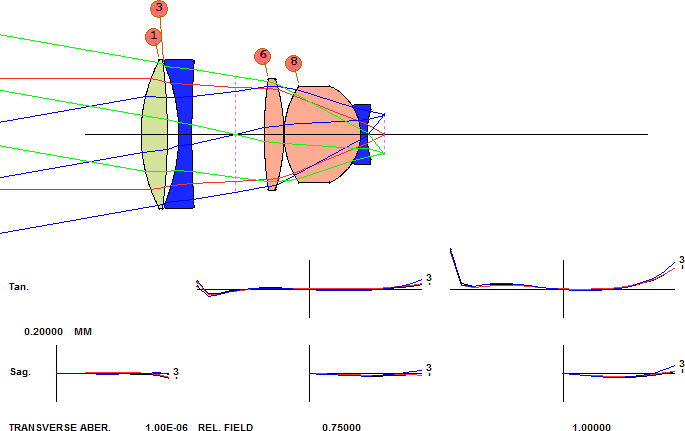
结果显示 这些像差非常小。那么初始透镜的像差怎么样? 0oi5]f6g?8
ID FIVE-ELEMENT LENS L�O$#DHP�t
f_�5�R�!;
THIRD-ORDER ABERRATION ANALYSIS �Y;> �p)'z
FOCAL LENGTH ENT PUP SEMI-APER GAUSS IMAGE HT q/w6sQ�x�$
50.800 25.400 8.957 1n�"�+~N^\
�iM\��Z�J6
THIRD-ORDER ABERRATION SUMS 32-3C6f@oZ
SPH ABERR COMA TAN ASTIG SAG ASTIG PETZVAL DISTORTION 5��3u�.p�c
(SA3) (CO3) (TI3) (SI3) (PETZ) (DI3(FR)) I��3zi�tI;
-0.01806 -0.03730 -0.04236 -0.08744 -0.10998 -0.01754 u�>A��xq3F
�*p���#YK|
PARAXIAL CHROMATIC ABERRATION SUMS a9@l8{)RX�
AX COLOR LAT COLOR SECDRY AX SECDRY LAT $���Op/�5j
(PAC) (PLC) (SAC) (SLC) /4-eo�Txy�
-0.01215 0.01518 0.00724 0.00478 �v4�k=NH+w
K}5�$;W#��
这些像差要大得多 - 但初始透镜性能要好得多! 所以在像差平衡方面,不要试图将像差校正到极端状态。 Bn�#HJ17/#
一般人们在设计透镜时,通常只关心两件事:图像是否清晰,是否在正确的位置。 [@. jL0�>�
然而,这些三阶像差在降低公差敏感度上有很重要的作用。 这是因为,当透镜制造偏差越大,三阶像差变化最快。 因此,我们定义了一组可以放入AANT文件的八个定义像差的命令: R�SWB!��-�
SAT COT ACD ACT ECD ECT ESA ECO O�'& \-j 1
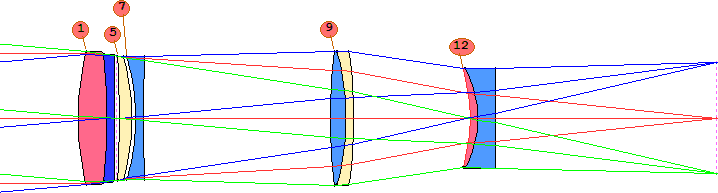
以下是如何使用这些像差来放宽透镜公差的示例。 我们优化了下面所示的透镜,并以目标波前权重0.05运行BTOL。 P���#2T�M
RLE T\e)Czz2-
ID 8-ELEMENT TELEPHOTO 236 i2ml[;*�,N
FNAME 'L6L2.RLE ' 7�d��g
5HH
MERIT 0.145212E-01 LOG 236 ^�%*{:�0'�
WAVL .6562700 .5875600 .4861300 &A5[C��{x�
APS 4 seD+�~Y\z�
GLOBAL �{R�{��%Z�
fN*4��(yw
UNITS MM ��Ko]h r��
OBB 0.000000 5.00000 25.40000 -0.88448 0.00000 0.00000 U5ud?z()OA
25.40000 �98%tws��`
0 AIR I�O&#�)�Ft
1 RAD 107.5431718565176 TH 11.00000000 (zL�I��v9$
1 N1 1.61726800 N2 1.62040602 N3 1.62755182 �f+*�2K�^B
1 CTE 0.630000E-05 J0W��XH/:�
1 GTB S 'SK16 ' e/�%�� ��;
2 RAD -349.2713337442812 TH 3.00000000 3�6Z`.E>~L
2 N1 1.69220502 N2 1.69894060 N3 1.71544645 �eN�C�5' Z
2 CTE 0.790000E-05 pu)9"Ad[ G
2 GTB S 'SF15 ' \7tvNa,�C�
3 RAD -2.9912862137173E+05 TH 1.00000001 AIR (P�rP�H/$�
TH 1.00000001 AIR tA��u|8a�L
TH 5.00000000 UU�EDCtF)�
5 N1 1.51981155 N2 1.52248493 N3 1.52859442 fUWm7>6VA>
5 CTE 0.820000E-05 �l'{goy��f
5 GTB S 'K5 ' 0��_zSQn9c
6 RAD -90.4865897926554 TH 1.35282284 AIR 3{�L���vKe
7 RAD -87.2286998720792 TH 3.00000000 ]jY)M<:�J4
7 N1 1.61502503 N2 1.62003267 N3 1.63207204 e���Wk2YP!
7 CTE 0.820000E-05 vls> 6h��
7 GTB S 'F2 ' 0�JRB�N�h
8 RAD 491.7930148457936 TH 73.15839431 AIR 1�H[;7@o$e
9 RAD 218.6390525466715 TH 6.00000000 �|�v'5*n9
9 N1 1.61502503 N2 1.62003267 N3 1.63207204 r�|�F,\�fF
9 CTE 0.820000E-05 L2O5�7rT2�
9 GTB S 'F2 ' ��wG[l9)lz
10 RAD -99.1627747164714 TH 3.00000000 �_C8LK.M#j
10 N1 1.51981155 N2 1.52248493 N3 1.52859442 Mc3h
� �R0
10 CTE 0.820000E-05 J�snmn$�C
10 GTB S 'K5 ' -Jr�c'e4K
11 RAD -182.3746109793576 TH 45.48880137 AIR sF3
l##Wv�
12 RAD -67.5075897018110 TH 3.00000000 ql��T:9*&g
12 N1 1.61726800 N2 1.62040602 N3 1.62755182 0|Ft0y�`+
12 CTE 0.630000E-05 9�*��Twx&
12 GTB S 'SK16 ' g���(r'Y#U
13 RAD -40.7083005956173 TH 7.00000000 �)ZU#19vr7
13 N1 1.61502503 N2 1.62003267 N3 1.63207204 ��vHe�.+XY
13 CTE 0.820000E-05 B;�7s��]R
13 GTB S 'F2 ' �qq%_k�sQ�
14 RAD -832.2479524920537 TH 86.31660394 AIR ��z}N^`_ *
14 CV -0.00120156 <gz�MDX[^M
14 UMC -0.10260000 �XN%D`tbvJ
14 TH 86.31660394 p;Ok.cXV�p
14 YMT 0.00000000 ��;RZa<2��
15 CV 0.0000000000000 TH 0.00000000 AIR 4�GejT(�U�
END �C�MjPp`rA
Y �tj�>U��
一些公差降低得非常快速,如下表所示,其中标称数据是针对此透镜的。 oqo8{hrdHk
将透镜位置保持公差很紧导致制造成本将会很昂贵。(看看表面7上的中心公差。)所以我们按如下方式进行: �tl�^;iE!-
1.运行命令THIRD SENS,查看这些参数的当前值。 }���4`�YdN
THIRD SENS �/ ^M3-5@Q
ID 8-ELEMENT TELEPHOTO Ec/�+�9H6g
.%h�_W\M<l
NORMALIZED 3RD-ORDER ANALYSIS OF TOLERANCE SENSITIVITY #^w� 1!xXD
9.}3RAB(cv
SS OF SA3 BY SURFACE (SAT) = 85.107903 � ]=�� D
SS OF CO3 BY SURFACE (COT) = 21.404938 ky"7�� ^��
SS OF CO3/YDC BY SURFACE (ACD) = 0.007657 o�|.me� G�
SS OF CO3/TILT BY SURFACE (ACT) = 73.889722 ��]V\��g$@
SS OF CO3/YDC BY ELEMENT (ECD) = 0.003941 zMg^2{0L�
SS OF CO3/TILT BY ELEMENT (ECT) = 31.259708 ?�U�Ib!k>�
SS OF SA3 BY ELEMENT (ESA) = 1.944190 �
0d)n}�fm
SS OF CO3 BY ELEMENT (ECO) = 0.492351 �LYKm2�C*d
Du�4?n8 �o
2.由于我们主要关注中心误差,我们可能会尝试降低ECD的值,即当元件偏心变化时,CO3的变化。 让我们添加到AANT文件(在L6M2.MAC中)的行 L7�'n�<$F�
M .001 100 A ECD5 n�9yv.p��]
L�)"w-�,zy
由于ECD已经是一个很小的数字(与列表中的其他数字相比),我们给它一个很高的权重,因此它对评价函数产生了影响。 请记住,我们不能简单地将所有这些值都定为零,因为通常不能设计没有任何像差的透镜元件,并且没有光焦度。 而且,这些量以不明显的方式耦合。 例如,如果减少SAT的值,您可能会发现COT也变小了。 1fG�@r�%4
你不能给他们各自分配一个独立的值,并期望程序可以自己找到这样的组合。 因此,明智的做法是一次一个地进行,直到找到最适合您透镜的参数。 在这个例子中,控制ECD的值,即可得到透镜。 aa3�Y�tNpP
THIRD SENS X,Q(W0-6$u
ID 8-ELEMENT TELEPHOTO 2!`Z3>�Oa
NORMALIZED 3RD-ORDER ANALYSIS OF TOLERANCE SENSITIVITY SS OF SA3 BY SURFACE (SAT) = 7.027782 9K���y�,oB
SS OF CO3 BY SURFACE (COT) = 4.876613 nW[aPQ[R��
SS OF CO3/YDC BY SURFACE (ACD) = 0.001649 � F<1'M#bl
SS OF CO3/TILT BY SURFACE (ACT) = 19.621736 N�#qoK�Y(#
SS OF CO3/YDC BY ELEMENT (ECD) = 0.001064 ^U1�+D^�AJ
SS OF CO3/TILT BY ELEMENT (ECT) = 8.602740 P�SvRO%�&�
SS OF SA3 BY ELEMENT (ESA) = 0.185606 L(YT6Vmm+t
SS OF CO3 BY ELEMENT (ECO) = 0.127624 '�7%9Sq�x
<m�\TZQB�D
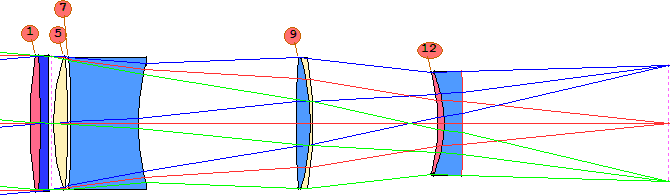
即使我们只针对其中一个(ECD),请注意所有值都已更改。 该透镜的公差列于上表中的情况A.。显然,现在的公差要宽松得多,尽管这对制造商来说仍然是一个挑战。 让我们再试一试。 这次我们将ACT的值定为7.0,即标称值的1/10。 �`Q�[$R�&\
M 7 1 A ACT 4K,&Q/Vdd7
�A]�slssE+
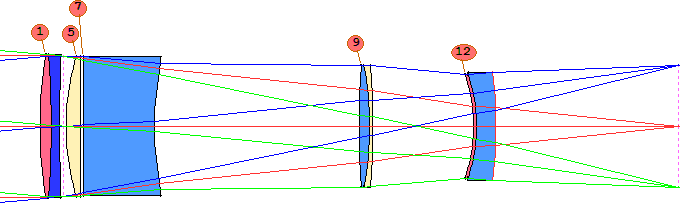
透镜视图如下: �XiUsaoQm3
公差列在上面的案例B中。 对于一些公差来说,这可能是更好的预估。 (我们忽略了本课程的可制造性问题:某些元件太薄,应该使用ACM监视器进行控制。) \8H"l�cj:�
您选择控制的数量取决于您想要影响的公差。 例如,空气间隔的公差可以响应对ESA数量的控制。 另一方面,透镜厚度公差可能对SAT更好地响应。 您必须了解您的透镜,并尝试使用这些工具,以找到最佳目标和最佳BTOL预估。 -#hl&�^�u$
有时这些量的作用是增加评价函数。 通常这不是一个好主意,因为如果像质变得更糟,公差通常会变得更紧。 但是,本课中工具的放松效果有时会超过这种效果,无论如何都会使公差更加宽松。 当然,这只能在一定程度范围之内,如果评价函数太大,你的评价函数应该要求一个要求较低的值。 o{eG����6�
我们无法保证任何这些像差目标在任何特定情况下都能起作用,但经验表明它们肯定值得一试。 您的公差可以放宽2到10倍。 �TR;-�xst@
最后,我们提到控制单个元件灵敏度的另一种非常有效的方法是使用SECTION像差。 虽然本课程中讨论的数量适用于所有表面或元件,因此非常易于使用,但SECTION像差仅适用于您指定的表面范围。 如果一个元件仍然被分配了一个非常紧的中心公差,即使你尝试了本节中给出的目标 - 如果某些元件的公差变得更宽松但问题元件的公差变得更紧,可能会发生这种情况 - 你可能只控制那个含彗差或球差的元件。 这使您可以精确控制所需的像差,并且通常值得采取额外步骤。 例如,如果表面13和14处的元件非常敏感,您可以尝试
#wcoLCjs)
M 0 .1 A SECTION SA3 13 14 WocF�ID:b
p�_5+L@%Gb
并尝试目标和权重直到获得最佳效果。
|