X光
成像通常基于Talbot效应和
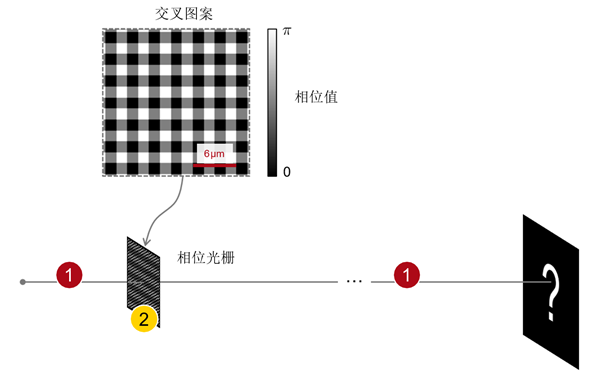
光栅的自成像。 遵循N. Morimoto等人的工作,我们选择了三种类型的相位光栅,分别是交叉型,棋盘形和网格图案。 在本案例中,光栅被用于单光栅
干涉仪中,建模为仅相位透射
函数(因为X射线
波长远小于光栅周期),并在
VirtualLab Fusion中我们还检查了其自成像。
u��-wj\�BU j�;&�su=p"  �@PK�Y>58) �#C�h�F{mh 建模任务 7Rr�
+Uzb(
�@PK�Y>58) �#C�h�F{mh 建模任务 7Rr�
+Uzb( 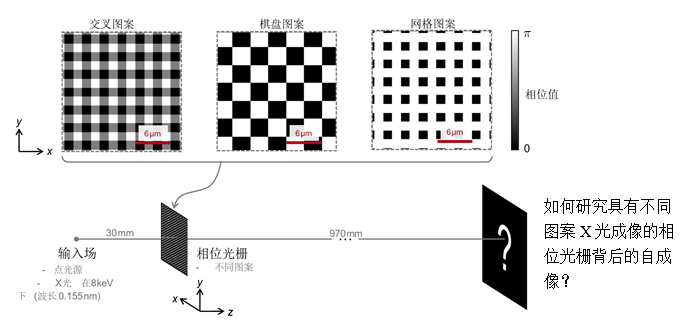 D�'_��w
*� 系统参数
D�'_��w
*� 系统参数来自 N. Morimoto, et al., Opt. Express 23, 29399-29412 (2015)
_s�0;mvz'�
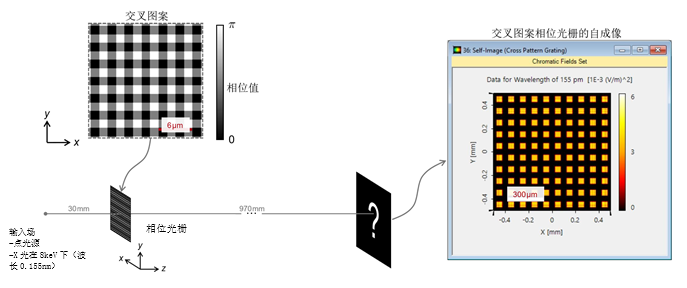
3gs7�Xj%N� 交叉图案相位光栅系统参数来自 N. Morimoto, et al., Opt. Express 23, 29399-29412 (2015)
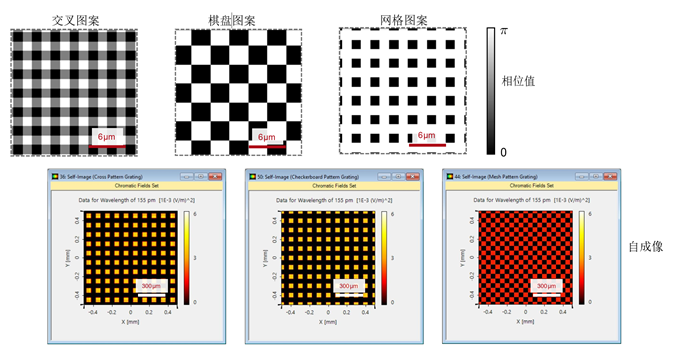
�K@!G�s'Op to] ~$~Q|> 交叉图案相位光栅 \2 �`|e�o�
lM%3 ?~?Q&
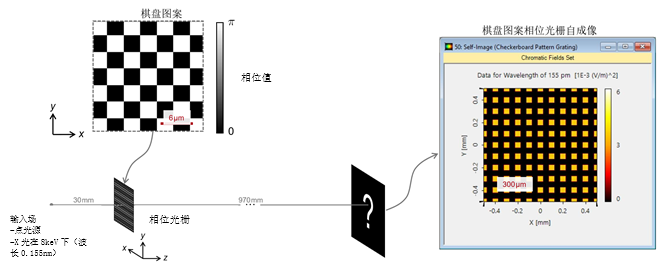
 /Nd�`�e�Un 棋盘图案相位光栅 �$_W k�I�^
/Nd�`�e�Un 棋盘图案相位光栅 �$_W k�I�^
-h&KC{�Xab
 o�Mb��@)7� W�P?�A��QD 网格图案相位光栅 P?`��a{sl.
o�Mb��@)7� W�P?�A��QD 网格图案相位光栅 P?`��a{sl.
=zwn3L8�fL
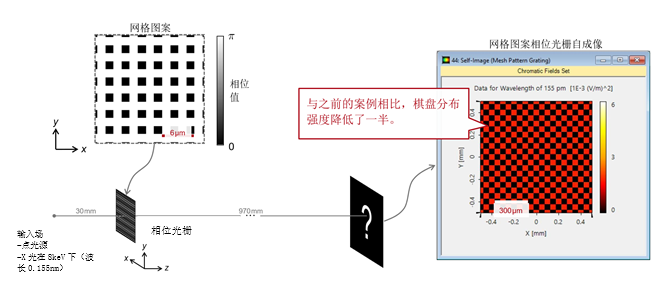 3c[T�PD�_: PCiwQ4�~� 不同案例对比 AbOF�/�g)C
3c[T�PD�_: PCiwQ4�~� 不同案例对比 AbOF�/�g)C
lD1�m�<A�C
 ks(BS� �k4 {} Zqa��f� 走进VirtualLab Fusion �y-a��3���
ks(BS� �k4 {} Zqa��f� 走进VirtualLab Fusion �y-a��3���
���}m.45n/
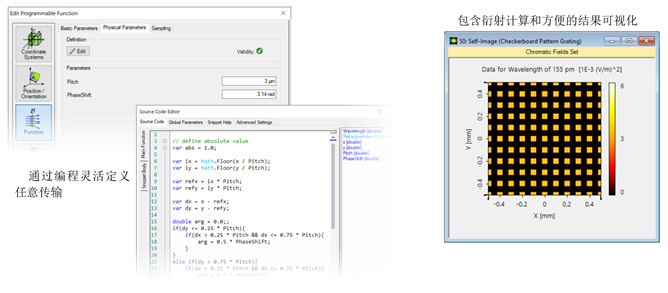 03dmHg.E!E a~�Y`N73/c VirtualLab Fusion工作流程 A�u{J/G<W@ &�]�1�g�x#
03dmHg.E!E a~�Y`N73/c VirtualLab Fusion工作流程 A�u{J/G<W@ &�]�1�g�x# •指定或自定义透射函数
]�9$^=z%SE V�\r2=ok@y •选择合适的
探测器进行光场可视化
!��s�[[X5 −电磁场探测器[用例]
C�dNb&Nyz •设置恰当的傅立叶变换
#HmZe98[%� 9 �EV.�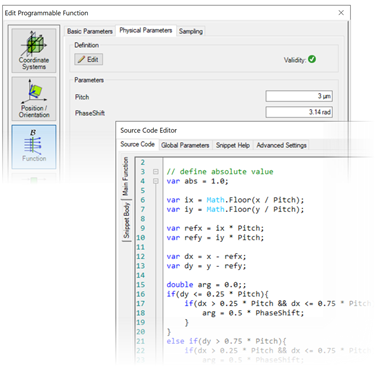 �LZ1�)z�oJ '�"]U+aIg VirtualLab Fusion技术 �HV8=b"D�"
�LZ1�)z�oJ '�"]U+aIg VirtualLab Fusion技术 �HV8=b"D�"
8@d@T V!n&
 tE;c�>=>t�
tE;c�>=>t�
 R2f^d��t�^
R2f^d��t�^



